Produktmerkmale
■ Die Eigenschaften eines zur Drehzahlregelung geeigneten bürstenlosen Motors werden vorgestellt
Bei einem bürstenlosen Motor ist es unnötig, einen Bürstenkommutator und einen anderen mechanischen Kontakt zu verwenden. Der Bürstenmotor benötigt zum Laufen Bürste und Kommutato, daher muss er regelmäßig gewartet werden. Der bürstenlose Motor verwendete jedoch Halle 1c, um das Signal zu erfassen, und verwendete die Ansteuerschaltung des Ein- / Ausschaltens des Kristallkatheters. so verzichtet es auf pflegen.
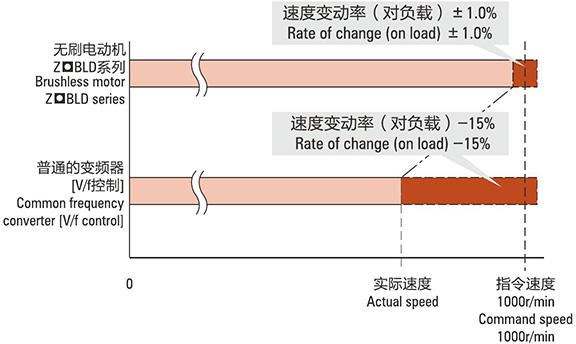
■ stabile Geschwindigkeitsregelung
bürstenlose Gleichstrommotoren vergleichen die Einstelldrehzahl jederzeit mit den Drehzahlrückmeldungssignalen des Motors und passen aus diesem Grund die angelegte Spannung des Motors an. Selbst wenn sich die Last ändert, wird eine stabile Drehung von niedriger Drehzahl auf hohe Drehzahl ausgeführt. Phaseninduktionsmotoren verfügen nicht über diese Art der Rückkopplungsregelung. Wenn sich die Last ändert, kann die Drehzahl beeinträchtigt werden. Bürstenlose Gleichstrommotoren werden für Anwendungen empfohlen, bei denen die Drehzahl unabhängig von der Lastschwankung beibehalten werden muss.
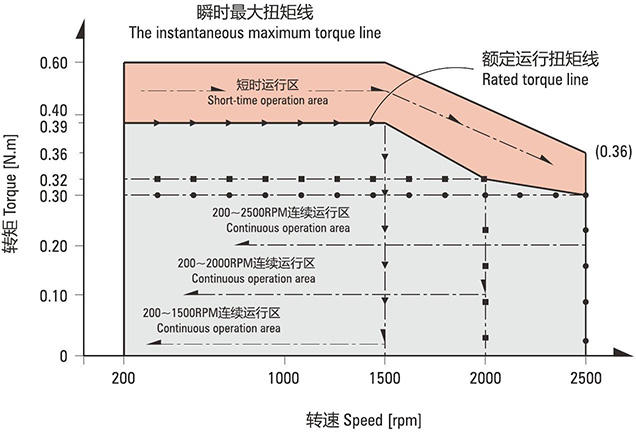
■ breiter Drehzahlregelbereich (zd ist derzeit die Geschwindigkeitsbegrenzung auf 2500 U / min, diese Antriebsänderung kann auf den 4000 U / min-Motor angewendet werden)
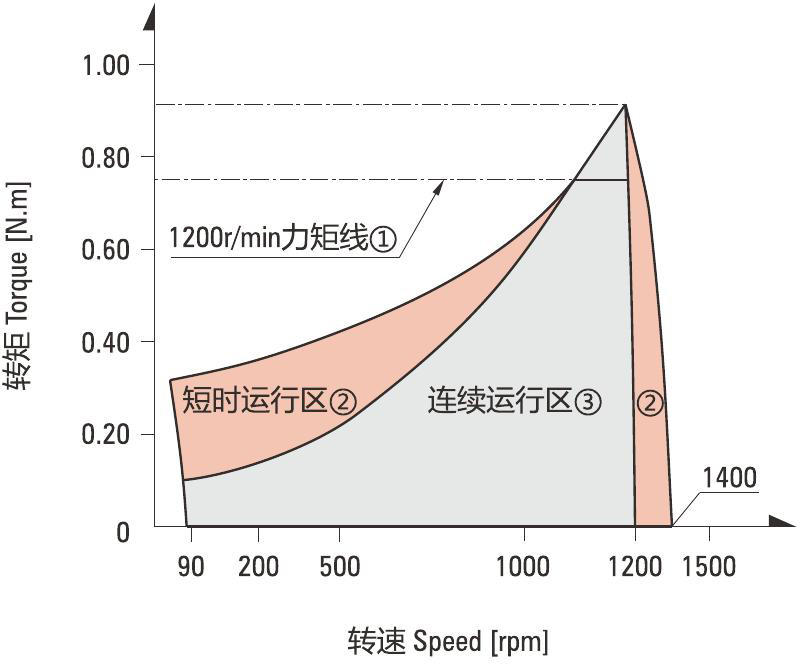
Der bürstenlose Gleichstrommotor hat einen breiteren Drehzahlregelungsbereich als dreiphasige Motoren mit Umrichterantrieb. Im Gegensatz zu dreiphasigen Motoren mit Umrichterantrieb ist das Drehmoment bei niedriger Drehzahl nicht begrenzt, sodass bürstenlose Gleichstrommotoren für Anwendungen geeignet sind, die eine konstante Leistung erfordern.
|
Produktstil
|
Geschwindigkeitsregelbereich
|
Ratenverhältnis
|
|
bürstenlosen Motor
|
80-4000
|
50
|
|
Frequenzumrichtersteuerung
Dreiphasen-Induktionsmotor
|
200-2400
|
12
|
|
einC Drehzahlregelmotor
|
50 Hz: 90-1400
|
fünfzehn
|
|
60 Hz: 90-1600
|
17
|
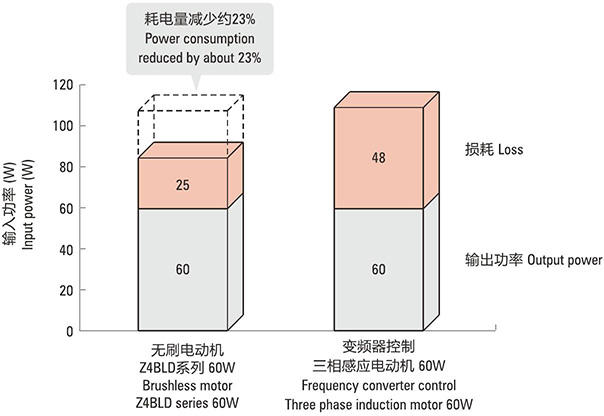
■ Energie sparen
Gleichstrombürstenmotor verwendet Permanentmagnete, es kann den Sekundärverlust des Rotors reduzieren. Verglichen mit der Frequenzumwandlungssteuerung eines Drehstrom-Induktionsmotors reduzierte sich die Leistung um 23%. Dies ist zugunsten der Energieeinsparung.
■ niedrige Drehzahl und hohes Drehmoment
Der bürstenlose Gleichstrommotor hat ein konstant großes Drehmoment, wenn er mit niedriger Drehzahl läuft.
|
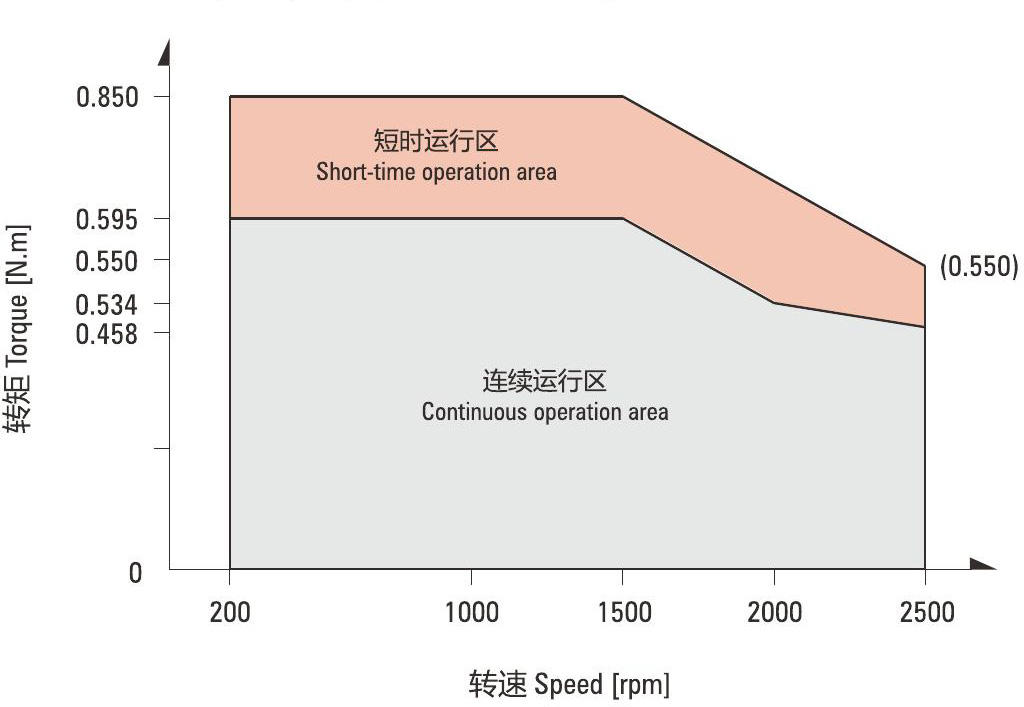
• Diagramm z5bld120-220gu-25s (zd-Standardlaufwerk)
|
• 5ik120rgu-cf (220 V / 50 Hz) (zd-Standardlaufwerk)
|
• Arbeitsleistungstabelle des bürstenlosen Motors und des Motors mit einstellbarer Wechselstromdrehzahl
|
seriell
Nummer
|
z5bld120-220gu-25s
|
5ik120rgu-cf
|
|
Moment
n.m.
|
Geschwindigkeit
U / min
|
Strom
ein
|
Effizienz
%..
|
Temperaturanstieg
k
|
Moment
n.m.
|
Geschwindigkeit
U / min
|
Strom
A
|
Effizienz
%
|
Temperaturanstieg
k
|
|
1
|
0,595
|
200
|
0,485
|
26.5
|
≤ 50k
|
0,010
|
200
|
0,850
|
3.00
|
<80k
|
|
2
|
0,595
|
500
|
0,671
|
47.5
|
≤ 50k
|
0,150
|
500
|
1,070
|
8.00
|
<80k
|
|
3
|
0,595
|
1000
|
0,966
|
62,0
|
≤ 40k
|
0,500
|
1000
|
1.186
|
32.5
|
<80k
|
|
4
|
0,595
|
fünfzehn00
|
1.200
|
69,0
|
≤ 40k
|
0,915
|
1400
|
0,981
|
60.0
|
<55k
|
|
Umgebungstemperatur10 ~ ~ 40 ℃ Umgebung
|
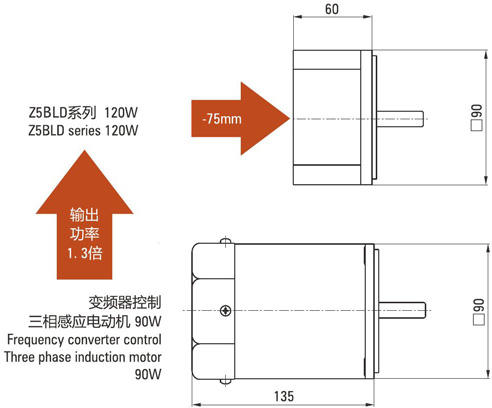
■ dünne, hohe Leistung
Bürstenlose Gleichstrommotoren haben einen schlanken Körper und bieten eine hohe Leistung, da im Rotor Permanentmagnete verwendet werden. Beispielsweise ist die Gesamtlänge 75 mm kürzer und die Ausgangsleistung 1,3-mal höher als die von Drehstrom-Induktionsmotoren mit einer Baugröße von 90 mm. Die Verwendung von bürstenlosen Gleichstrommotoren kann zur Verkleinerung und Platzersparnis beitragen.
■ Schutzfunktion, um die Sicherheit des Gerätesystems zu schützen
Aufgrund der Belastung durch den Überstrom-, Unterspannungs- und Offenphasenschutz kann aus diesem Grund die Sicherheit des Gerätesystems gewährleistet werden.
■ Motordrehzahl
|
Motor--drehzahl \ Abtriebswellendrehzahl \ Untersetzung
Verhältnis
|
3
|
3.6
|
5
|
6
|
7.5
|
9
|
10
|
12.5
|
15
|
18
|
20
|
25
|
|
200-1500 U / min
|
67-500
|
56-417
|
40-300
|
33-250
|
27-200
|
22-167
|
20-150
|
16 ~ 120
|
13-100
|
11-83
|
10 〜75
|
8-60
|
|
2000 U / min
|
667
|
556
|
400
|
334
|
267
|
223
|
200
|
160
|
134
|
112
|
100
|
80
|
|
2500 U / min
|
833
|
695
|
500
|
417
|
334
|
278
|
250
|
200
|
167
|
139
|
125
|
100
|
|
Motordrehzahl \ Abtriebswellendrehzahl \ Untersetzung
Verhältnis
|
30
|
36
|
50
|
60
|
75
|
90
|
100
|
120
|
150
|
180
|
200
|
|
|
200-1500 U / min
|
7〜50
|
6〜42
|
4〜30
|
3〜25
|
3〜20
|
2-17
|
2-15
|
2-12.5
|
1,5-10
|
1〜8
|
1〜7_5
|
|
|
2000 U / min
|
67
|
56
|
40
|
34
|
27
|
23
|
20
|
17
|
14
|
12
|
10
|
|
|
2500 U / min
|
84
|
70
|
50
|
42
|
34
|
28
|
25
|
21
|
17
|
14
|
12.5
|
|
■ Produkttyp der Motorspezifikation
|
Motor
|
quadratische Größe
|
Ausgangsleistung
|
Modell-
|
Treiber
|
Spannungsversorgung
|
 |
60x60
|
15-25
|
Standard-Typ
ip40
oder ip54
|
 |
dc24-48
einphasig 100-120V
einphasig 220〜240v
|
|
80x80
|
40、60
|
|
90 x 90 (gn)
|
40、60
|
|
90 x 90 (gu)
|
60 、 90 、 120
|
|
104 x 104
|
200 、 400
|
■ Motorleistung - Grundleistung
|
Projekt iteam
|
Motor
|
Treiber
|
|
Isolationswiderstand (kein Motor- und Antriebsverbindungszustandstest)
|
50 mq oder mehr, wenn nach kontinuierlichem Betrieb bei normaler Umgebungstemperatur und Luftfeuchtigkeit ein 500-VDC-Megger zwischen den Wicklungen und dem Gehäuse angelegt wird
|
50 Mo oder mehr, wenn ein 500-VDC-Megger zwischen dem Stromversorgungsanschluss und dem Schutzerdungsanschluss sowie zwischen dem Stromversorgungsanschluss und dem E / A-Signalanschluss nach kontinuierlichem Betrieb bei normaler Umgebungstemperatur und Luftfeuchtigkeit angelegt wird
|
|
Isolationswiderstand (kein Motor- und Antriebsverbindungszustandstest)
|
Ausreichend, um 1,5 kV Wechselstrom bei 50 Hz zwischen den Wicklungen und dem Gehäuse 1 Minute lang nach kontinuierlichem Betrieb bei normaler Umgebungstemperatur und Luftfeuchtigkeit standzuhalten
|
Ausreichend, um 1,5 kVAC bei 50 Hz zwischen der Stromversorgungsklemme und der Schutzerdungsklemme und der E / A-Signalklemme nach kontinuierlichem Betrieb bei normaler Umgebungstemperatur und Luftfeuchtigkeit 1 Minute lang auszuhalten
|
|
Temperaturanstieg
|
Der Temperaturanstieg der Wicklungen beträgt maximal 55 ° C und der der Gehäuseoberfläche beträgt maximal 40 ° C, gemessen nach der Thermoelementmethode nach kontinuierlichem Nennbetrieb bei normaler Umgebungstemperatur und Luftfeuchtigkeit①
|
Die Temperatur des Kühlkörpers beträgt maximal 50 ° C, gemessen nach der Thermoelementmethode nach Nenn-Dauerbetrieb bei normaler Umgebungstemperatur und Luftfeuchtigkeit
|
|
Umgebung verwenden
|
Umgebungstemperatur
|
-10 ℃ ~ 40 ℃ (nicht gefrierend)
|
|
Umgebungsfeuchtigkeit
|
85% oder weniger (nicht kondensierend)
|
|
Höhe
|
1000m folgen
|
|
mittlere Umgebung
|
nicht korrosives Gas, Staub; kann nicht in einer speziellen Umgebung verwendet werden, die radioaktive Substanzen, Magnetfelder und Vakuum usw. enthält
|
|
Vibration
|
keine ständigen Vibrationen oder übermäßigen Stöße auszuüben
|
|
sparen
Umwelt②
|
Umgebungstemperatur
|
-10 ℃ ~ 40 ℃ (nicht gefrierend)
|
|
Umgebungsfeuchtigkeit
|
85% oder weniger (nicht kondensierend)
|
|
Höhe
|
1000m folgen
|
|
Hitzebeständigkeit
|
b Bühne
|
/
|
|
Schutzlevel
|
ip40 & ip54
|
ip20
|
① Damit die Oberflächentemperatur des Motorgehäuses unter 90 ° C gehalten werden kann, muss der Motor in den folgenden Abmessungen der Strahlungsplatte (Material: Aluminium) installiert sein. Dicke von 25 W: 115 x 115 x 5, Dicke des 60 W: 135 x 135 x 5, Dicke des 120 W: 165 x 165 x 5, Dicke des 200 W: 200 x 200 x 5. (Einheit: mm)
② Die Lagerbedingungen gelten für einen kurzen Zeitraum, z. B. einen Zeitraum während des Transports.
 DE
DE