DE
DE

Aufmerksamkeit:
Beachten Sie die folgenden Vorsichtsmaßnahmen zu Installation, Verkabelung, Betrieb, Wartung und Inspektion, um Personen- und Sachschäden durch Missbrauch zu vermeiden.
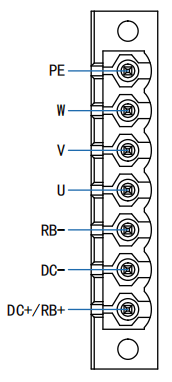
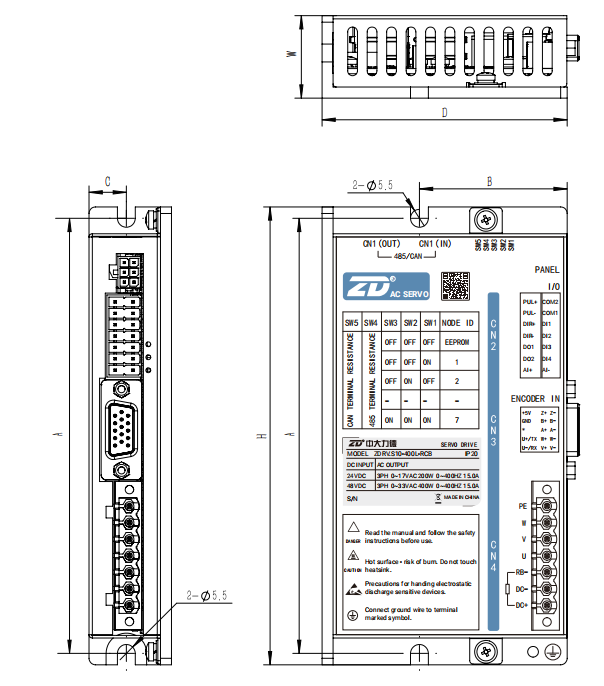
1】Bitte schließen Sie das Erdungskabel an die Klemme mit Erdungsmarkierung an, um sicherzustellen, dass das Servosystem fest geerdet ist;
2】Bitte tauschen Sie den Motor nicht aus, verdrahten Sie nicht und berühren Sie die Kabelanschlüsse nicht innerhalb von 5 Minuten nach dem Ausschalten, da sonst die Gefahr eines Stromschlags besteht;
3】Bitte berühren Sie während des Betriebs nicht den Kühlkörper, den Motor und den Bremswiderstand, um Verbrennungen zu vermeiden;
4】Bitte stellen Sie Überstromschutzgerät, Fehlerstromschutzschalter und Not-Aus-Gerät ein und bestätigen Sie deren Wirksamkeit vor dem Betrieb;
5】Bitte stellen Sie einen externen Not-Aus-Schaltkreis ein, um sicherzustellen, dass der Betrieb rechtzeitig gestoppt und die Stromversorgung im Notfall unterbrochen werden kann;
6】Bitte lassen Sie den Servomotor zuerst ohne Last laufen, um Unfälle vor dem Probelauf zu vermeiden;
7】Bitte schalten Sie den Servotreiber nicht häufig ein/aus;
8】 Es ist strengstens verboten, Installation, Verkabelung und andere Vorgänge unter eingeschalteten Bedingungen durchzuführen;
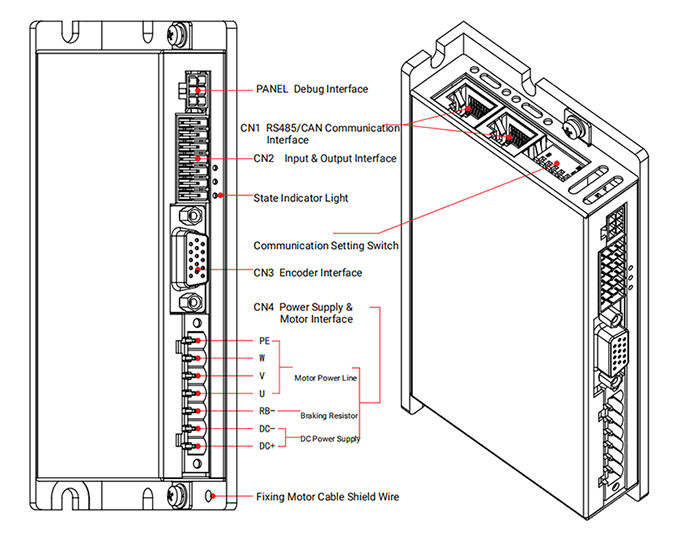
9】Bitte schließen Sie die Motorkabelklemme nicht an die Hauptversorgung an;
10】Bitte zerlegen, modifizieren oder reparieren Sie den Servomotortreiber nicht selbst;
11】Bitte schalten Sie die Stromversorgung des Treibers aus, wenn ein Fehler auftritt;
12】Das Gerät muss ausgeschaltet werden, wenn es längere Zeit nicht benutzt wird.
Speicherumgebung:
Dieses Produkt muss vor der Installation in die Verpackungsbox gelegt werden. Wenn es vorübergehend nicht verwendet wird, beachten Sie bei der Lagerung bitte die folgenden Punkte
Damit das Produkt dem Schutzumfang unseres Unternehmens und der zukünftigen Wartung entspricht:
Damit das Produkt dem Schutzumfang unseres Unternehmens und der zukünftigen Wartung entspricht:
● Die Umgebungstemperatur am Lagerort muss im Bereich von -20 °C bis 80 °C liegen;
● Die relative Luftfeuchtigkeit am Lagerort muss ohne Kondensation im Bereich von 0 % bis 90 % liegen;
● Vermeiden Sie die Lagerung in einer Umgebung, die korrosive Gase oder Flüssigkeiten enthält.
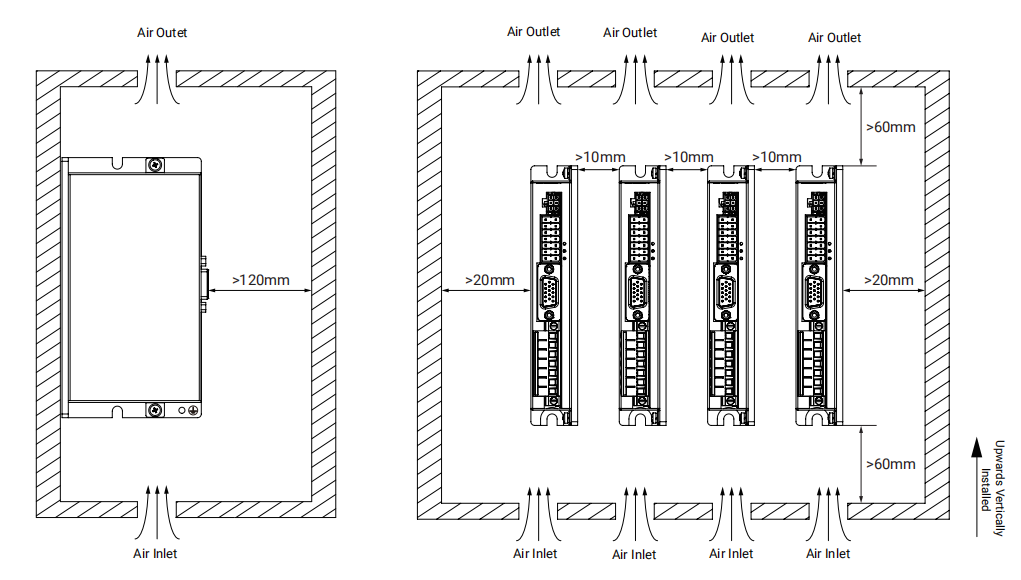
Installationsumgebung:
● Die Arbeitsumgebungstemperatur der Servoeinheit: 0~45℃;
● Luftfeuchtigkeit: unter 90 % relative Luftfeuchtigkeit (relative Luftfeuchtigkeit);
● Vibration: 4,9 m/s², anwendbare Höhe: weniger als 1000 m, bei mehr als 1000 m ist eine geringere Leistung erforderlich;
● Um Einfrieren oder Kondensation zu vermeiden
● Bitte verwenden Sie es bei Umgebungstemperaturen unter 45 °C, um die Zuverlässigkeit des Langzeitgebrauchs zu gewährleisten.
● Die Arbeitsumgebungstemperatur der Servoeinheit: 0~45℃;
● Luftfeuchtigkeit: unter 90 % relative Luftfeuchtigkeit (relative Luftfeuchtigkeit);
● Vibration: 4,9 m/s², anwendbare Höhe: weniger als 1000 m, bei mehr als 1000 m ist eine geringere Leistung erforderlich;
● Um Einfrieren oder Kondensation zu vermeiden
● Bitte verwenden Sie es bei Umgebungstemperaturen unter 45 °C, um die Zuverlässigkeit des Langzeitgebrauchs zu gewährleisten.
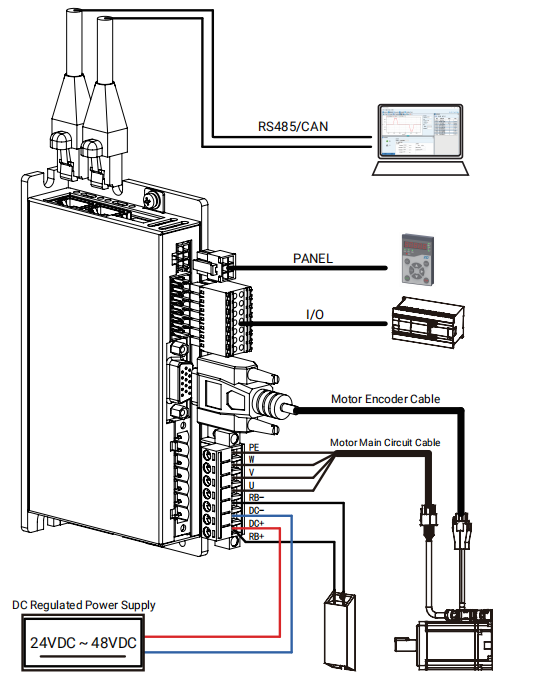
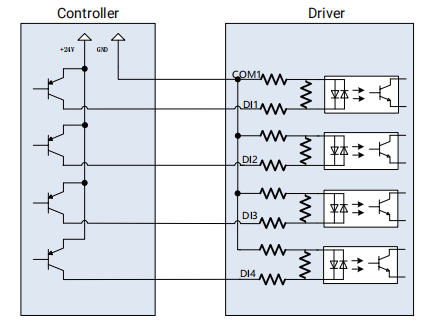
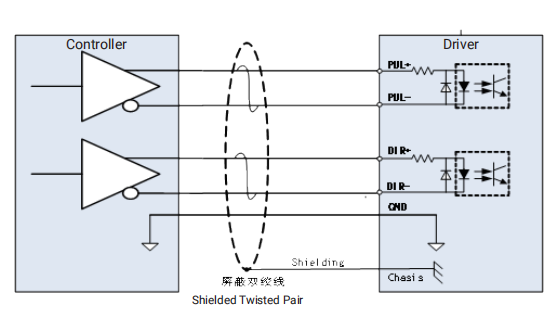
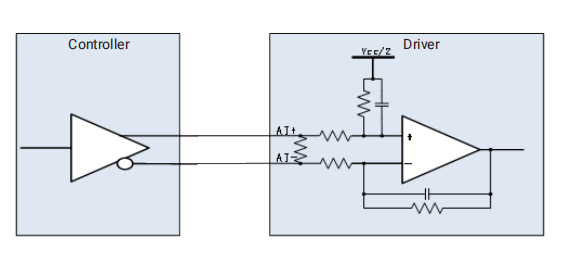
 Hinweis: Wenn ein 24-V-Impulssignal angeschlossen ist, muss ein 2K-Widerstand an die Impulssignalleitung angeschlossen werden und die Leistung muss höher als 0,5 W sein.
Hinweis: Wenn ein 24-V-Impulssignal angeschlossen ist, muss ein 2K-Widerstand an die Impulssignalleitung angeschlossen werden und die Leistung muss höher als 0,5 W sein.